

W analizie metodą elementu skończonego (MES), problem jest przedstawiany jako układ równań algebraicznych, które muszą zostać rozwiązane równocześnie. Istnieją dwie klasy metod rozwiązania: bezpośrednia i iteracyjna.
Metody bezpośrednie rozwiązują równania przy użyciu dokładnych technik numerycznych. Metody iteracyjne rozwiązują równania przy użyciu technik przybliżeniowych, w których w każdej iteracji zakładane jest rozwiązanie i obliczane są skojarzone z nim błędy. Iteracje są powtarzane do czasu, gdy błędy osiągną wartości do przyjęcia.
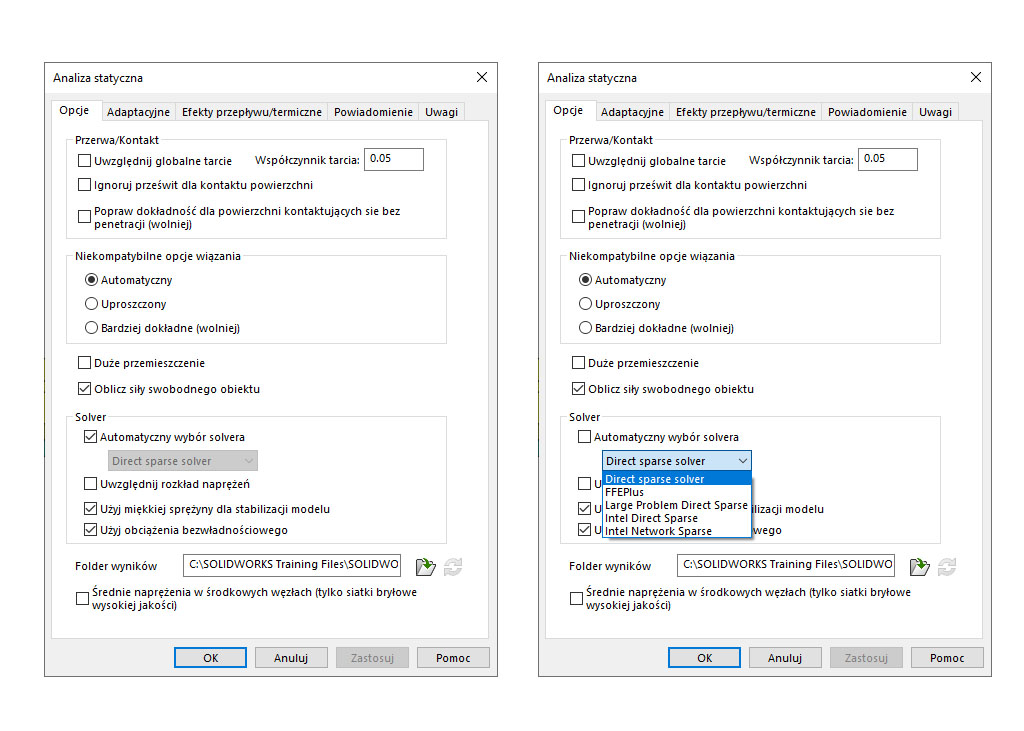
Podczas przeprowadzania analizy w SOLIDWORKS Simulation do wyboru mamy 5 typów solverów: FFEPlus, Direct Sparse, Intel Direct Sparse, Large Problem Direct Sparse oraz Intel Network Sparse. Solver FFEPlus wykorzystuje iteracyjną metodę obliczeniową, pozostałe to solvery bezpośrednie.
- Solvery iteracyjne
- FFEPlus
- Solvery bezpośrednie
- Direct Sparse
- Intel Direct Sparse
- Large Problem Direct Sparse
- Intel Network Sparse (dostępny w pakiecie Simulation Premium)
Wybór solvera jest możliwy z poziomu Właściwości badania w zakładce Opcje:
- Wersja 2020
- Wersja 2021

Domyślnie zaznaczony jest wybór Automatyczny. Zalecany dla początkujących użytkowników. W ten sposób program sam dobiera odpowiedni solver, według pewnych czynników:
- Ilość dostępnej pamięci RAM
- Występowanie dużego przemieszczenia
- Obecność odległych obciążeń
- Obecność łączników (zwłaszcza łączników śrubowych)
- Procent elementów będących skorupami i kontaktu wiązanego pomiędzy skorupami, bryłami i belkami
- Konwergencja podczas rozwiązywania interakcji typu kontakt (w starszych wersjach bez penetracji)
- Występowanie tarcia
- Symetria kołowa
Czym kierować się podczas wyboru solvera?
Podczas analizy problemów niewielkich rozmiarów (do 25 000 DOF*) wszystkie solvery dają podobne rezultaty. Jednak w przypadku dużych problemów różnice mogą znacząco się zwiększyć.
*DOF – degrees of freedom (stopnie swobody)
Czynniki, które należy wziąć pod uwagę podczas wyboru solvera:
- Ilość dostępnej pamięci RAM
- Potrzeba wykorzystania wielu rdzeni procesora
- Obecność dużej ilości interakcji typu kontakt (w starszych wersjach bez penetracji)
- Obecność złączy
- Występowanie tarcia
- Duże przemieszczenia
- Występowanie sporych różnic we właściwościach badanych materiałów (np. metal i tworzywo sztuczne)
Najogólniej mówiąc – solver iteracyjny lepiej sprawdzi się w przypadku obecności interakcji wiązanych, podobnych materiałów i niewielkich przemieszczeń. Solver bezpośredni dokładniej przeliczy interakcje różnego typu (w szczególności kontakt), tarcie, złącza (w szczególności śruby) i lepiej poradzi sobie w przypadku różnic materiałowych i dużych przemieszczeń.
Poniżej w tabeli zestawiono typy dostępnych solverów wraz z zastosowaniem:
| Solver | Opis | Zalety | Wady |
|---|---|---|---|
| Automatyczny | Na podstawie określonych czynników program sam dobiera typ solvera. | Dla początkujących użytkowników. | W przypadku kompleksowych problemów, nie zawsze zostanie wybrany najbardziej optymalny solver. |
| FFEPlus | Solver iteracyjny. Rozwiązuje równania przy użyciu technik przybliżeniowych, w których w każdej iteracji zakładane jest rozwiązanie i obliczane są skojarzone z nim błędy. Iteracje są powtarzane do czasu, gdy błędy osiągną wartości do przyjęcia. | Przeważnie najszybszy z solverów dla analiz statycznych. Wydajniej korzysta z dostępnej pamięci RAM (2 000 000 DOF / 1GB RAM) Preferowany dla problemów dużych rozmiarów. |
Nie jest zalecany w przypadkach, gdzie występuje duża ilość interakcji (szczególnie typu kontakt), oraz spore różnice we właściwościach materiałów. |
| Direct Sparse | Solver bezpośredni. | Preferowany, kiedy w analizie występują: interakcje typu kontakt, złącza, wirtualna ściana w warunkach brzegowych, miękkie sprężyny, symetria cykliczna, znacznie różniące się właściwości wykorzystanych materiałów (np. stal i nylon). | Potrzebuje znacznie więcej pamięci w porównaniu do modelu iteracyjnego (200 000 DOF / 1GB RAM). Zapotrzebowanie na pamięć rośnie wykładniczo wraz ze wzrostem liczby stopni swobody w modelu. |
| Intel Direct Sparse | Wprowadzony w wersji 2015. | Nowsza wersja solvera Direct Sparse. Jest szybszy i wydajniej korzysta z dostępnej pamięci. | |
| Large Problem Direct Sparse | Wprowadzony w wersji 2014 dla metod bezpośrednich dla rozwiązywania dużych problemów. | Nadaje się do rozwiązywania problemów o wielkości ponad 1 000 000 DOF. Jest w stanie przeprowadzić obliczenia dla symulacji, które wykraczają poza dostępną pamięć. | |
| Intel Network Sparse | Wprowadzony w wersji 2017. Dostępny w pakiecie Simulation Premium. | Jest w stanie wykonywać obliczenia na innych maszynach. |
Dodatkowe informacje o solverach SOLIDWORKS Simulation znajdują się na stronie: przejdź do Help SOLIDWORKS.






