Oprogramowanie RoboDK służy do programowania i symulacji pracy robota polegającej na m.in. spawaniu, szlifowaniu, klejeniu, malowaniu, druku 3D, paletyzacji, pick and place oraz wielu innych w tym frezowaniu i wierceniu. W tym artykule przedstawię współpracę RoboDK z programem ALPHACAM właśnie w obszarze frezowania i wiercenia.
ALPHACAM jest to wszechstronne oprogramowanie CAM, które pozwala na swobodne programowanie operacji takich jak m.in. frezowanie i wiercenie, niezależnie od stopnia skomplikowania geometrii detalu. Dzięki dedykowanej funkcjonalności, przygotowane w ALPHACAM strategie obróbcze są błyskawicznie transferowane do środowiska RoboDK w celu ich symulacji. Taka synergia sprawia, że zaawansowane przygotowanie technologii produkcji staje się intuicyjne, szybkie i wolne od błędów manualnych.
Opis Procesu
1. Przygotowanie technologii w ALPHACAM
Wszystko zaczyna się w środowisku AlphaCAM, gdzie importujemy model 3D lub tworzymy/importujemy geometrię 2D. Na tym etapie definiujemy parametry obróbcze:
- Wybieramy postprocesor.
- Wybieramy odpowiednie narzędzia (frezy, wiertła).
- Ustalamy strategie obróbki (np. obróbki 3D, obróbki 5X symultaniczne, konturowanie, wiercenie).
- Określamy parametry skrawania, takie jak posuwy i prędkości obrotowe wrzeciona.
2. Eksport danych z ALPHACAM do RoboDK
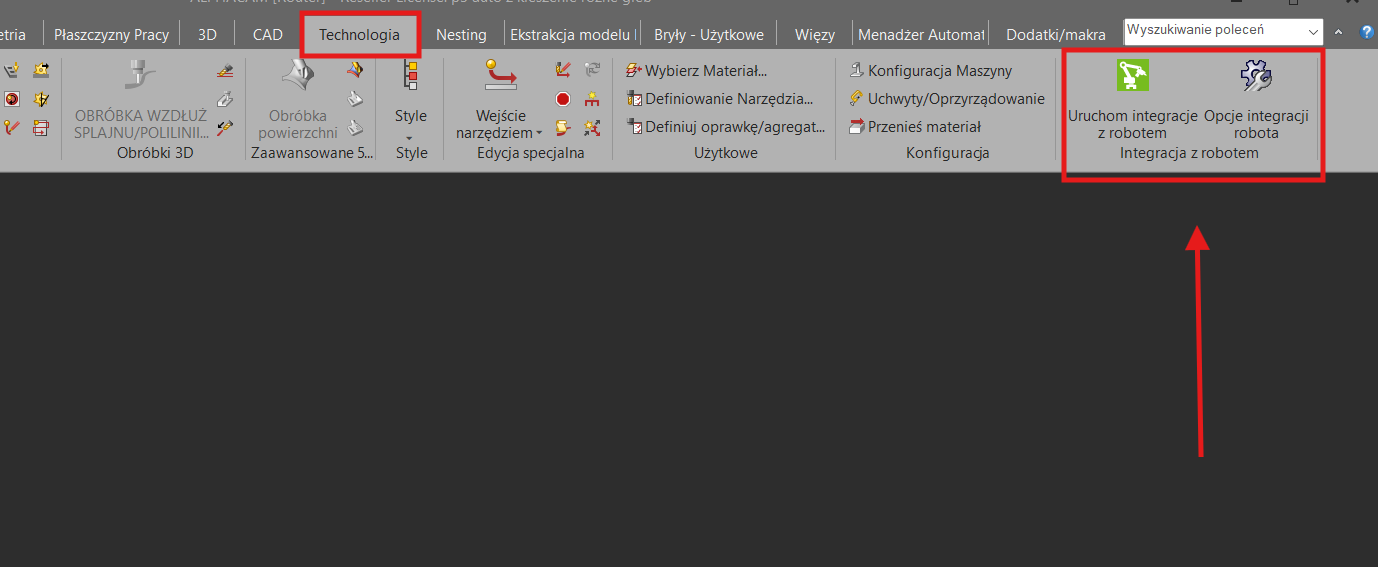
Znajdująca się na wstążce sekcja „Integracja z robotem” to autorskie rozwiązanie AlphaCAM, które sprawia, że proces programowania robota staje się tak samo prosty, jak programowanie zwykłej maszyny CNC. Przycisk „Uruchom integrację z robotem” pozwala na natychmiastowe przesłanie wszystkich operacji z listy bezpośrednio do RoboDK. System automatycznie generuje plik danych, otwiera symulator i umieszcza w nim ścieżki w czasie rzeczywistym.
3. Konfiguracja stanowiska zrobotyzowanego
Po stronie RoboDK należy przygotować środowisko przed zaimportowaniem ścieżek narzędzia z AlphaCAM:
- Wybieramy model robota z biblioteki (np. KUKA, ABB, Fanuc).
- Budujemy stację robota.
- Ustawiamy bazę detalu (Frame) względem podstawy robota.
4. Optymalizacja i symulacja 3D
To najważniejszy etap, w którym RoboDK zamienia ścieżkę CAM na ruchy osi robota. Program automatycznie wykrywa i pozwala wyeliminować:
- Kolizje: Sprawdza, czy ramię lub wrzeciono nie uderzy w stół lub detal.
- Osobliwości (Singularities): Koryguje ruchy, w których robot mógłby stracić płynność.
- Limity zasięgu: Weryfikuje, czy robot fizycznie sięgnie do każdego punktu ścieżki.
5. Generowanie kodu (Post-processing)
Gdy symulacja przebiega pomyślnie, programista RoboDK generuje gotowy program w języku ojczystym danego robota. Tak przygotowany plik przesyłamy bezpośrednio do kontrolera maszyny, mając pewność, że ruch będzie identyczny z tym, co widzieliśmy na ekranie.
Poniżej krótki film pokazujący proces współpracy AlphaCAM i RoboDK.