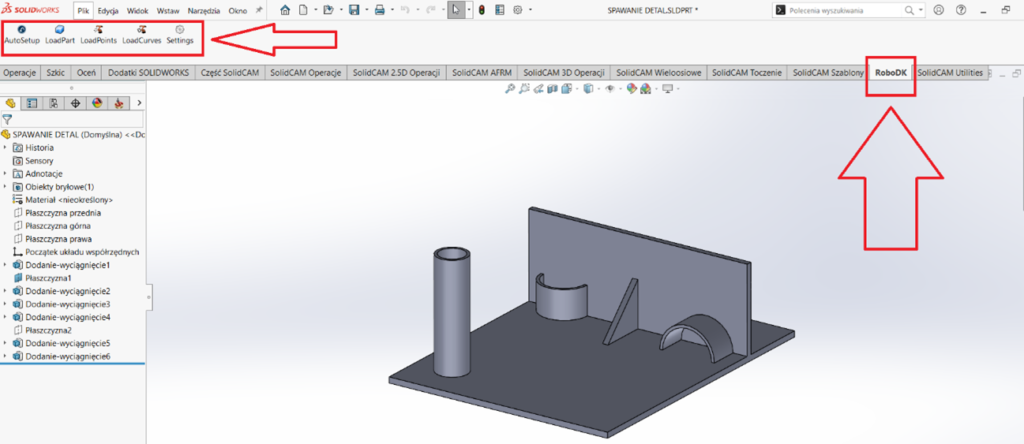
Oprogramowanie RoboDK służy do programowania ruchów robota oraz symulacji pracy tego robota na komputerze, co daje możliwość wczesnego wykrycia kolizji jeszcze podczas tworzenia procesu, sprawdzenia zasięgu robota itd. RoboDK we współpracy z SolidWorks pozwala na wygodne programowania ruchów robota poprzez graficzne wskazywanie krawędzi, powierzchni oraz punktów w programie SolidWorks. Odbywa się to poprzez wtyczkę, która instaluje się automatycznie podczas instalowania RoboDK, należy jednak pamiętać, aby wcześniej zainstalować SolidWorks na swoim komputerze.
W tym artykule pokażę jak programować trajektorię ruchów robota z wykorzystaniem kilku dostępnych opcji wcześniej wspominanej wtyczki, takich jak:
- AutoSetup
- LoadPoints
- LoadCurves
Po krótce również omówię LoadPart oraz Settings.
Settings
Settings – ustawienia dotyczące exportu modelu oraz ścieżki ruchów robota z SolidWorks do środowiska RoboDK, definiowania nazw, ustawienia polilinii, aktualizacji procesu itd.. W poniższym filmie pokaże kilka najważniejszych ustawień.
Autosetup
AutoSetup jest najbardziej zautomatyzowaną funkcją, która pozwala nam na określenie nie tylko trajektorii ruchów robota, ale również na jakiej wysokość oraz po części pod jakim kątem narzędzie robota (TCP) będzie pracowało. Te dodatkowe informacje są przekazywane do RoboDK, ponieważ w SolidWorks w tej konkretnej funkcji oprócz krawędzi, która odpowiada za trajektorię ścieżki robota wskazujemy również powierzchnie. Poza tym, korzystając z tej funkcji wraz ze ścieżką robota automatycznie jest również przenoszony model 3D ze środowiska SolidWorks do środowiska RoboDK. Korzystając z bardziej zaawansowanych funkcji już w samym RoboDK możemy zmienić m.in. kąt czy konfigurację robota. W poniższym filmie pokazuję krok po kroku jak efektywnie wykorzystać AutoSetup.
LoadCurves
LoadCurves jest funkcją, w której najważniejszą informacją jaka jest przekazywana do RoboDK jest trajektoria ruchów robota. Dzięki tej informacji robot jest w stanie wykonać ruch po wskazanej krawędzi, ścieżka ta wykonywana będzie z osią „Z” TCP narzędzia robota ustawioną pionowo lub pod kątem jeśli w SolidWorks wskazaliśmy również powierzchnie. Funkcja ta przenosi tylko ścieżkę robota ze środowiska SolidWorks do środowiska RoboDK, nie przenosząc modelu 3D. Korzystając z bardziej zaawansowanych funkcji już w samym RoboDK możemy zmienić m.in. kąt czy konfigurację robota. W poniższym filmie pokazuję krok po kroku jak efektywnie wykorzystać LoadCurves.
LoadPoints
LoadPoints jest funkcją, w której najważniejszą informacją jaka jest przekazywana do RoboDK jest położenie wskazanych punktów. Dzięki tej informacji robot jest w stanie dojechać do każdego wskazanego punktu pionowo od góry w osi Z lub pod kątem jeśli w SolidWorks wskazaliśmy również powierzchnie. Funkcja ta przenosi tylko punkty ze środowiska SolidWorks do środowiska RoboDK, nie przenosząc modelu 3D. Korzystając z bardziej zaawansowanych funkcji już w samym RoboDK możemy zmienić m.in. kąt czy konfigurację robota. Przykładem wykorzystania tej funkcji może być spawanie punktowe czy zgrzewanie. W poniższym filmie pokazuję krok po kroku jak efektywnie wykorzystać LoadPoints.
LoadPart
LoadPart jest bardzo prostą funkcją pozwalającą na automatyczne przeniesienie modelu 3D ze środowiska SolidWorks do środowiska RoboDK. Należy pamiętać o odpowiednim modelowaniu w SolidWorks lub odpowiednim ustawieniu „Frame” w RoboDK, względem którego zostanie zaczytany model, szczegóły pokażę na poniższym filmie.