Solidworks Motion, będący częścią SOLIDWORKS Simulation, jest w czasach zdigitalizowanego procesu projektowania niezbędnym narzędziem na biurku konstruktora. Oprogramowanie pozwala m.in. na weryfikację projektu pod kątem efektywności pracy, dobór odpowiednich napędów, sprężyn i tłumienia oraz optymalizację poszczególnych części gotowego produktu dzięki asocjatywności z modułem Simulation.
Dobór napędu w kilka chwil
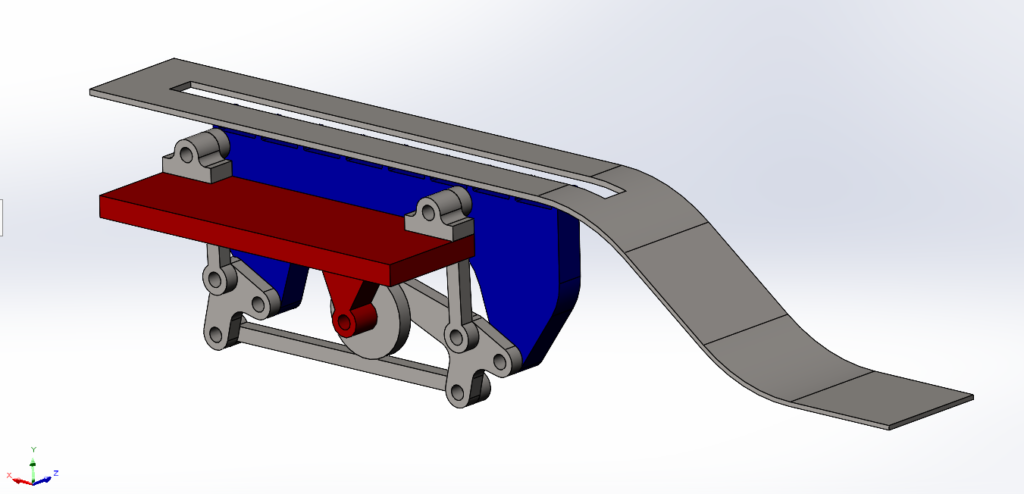
Funkcjonalność oprogramowania zostanie zaprezentowana na przykładzie podajnika przesuwającego cyklicznie gotowy komponent (w tym przypadku jest to profil konstrukcyjny). W złożeniu podajnika wyróżnić możemy kilka połączeń mechanicznych, w tym połączenia cięgłowe oraz dźwigienki umożliwiające konwersję ruchu. Końcowym zadaniem podajnika jest ześlizgnięcie komponentu wprost na przenośnik taśmowy, który w rozważanym złożeniu został pominięty. Zadaniem postawionym przed konstruktorem jest dobór odpowiedniego napędu, zapewniającego obrót ze stałą prędkością 100 obrotów na minutę oraz weryfikacja, czy komponent nie zatrzyma się w wyniku sił tarcia na „zjeżdżalni”.
Budowa analizy ruchu
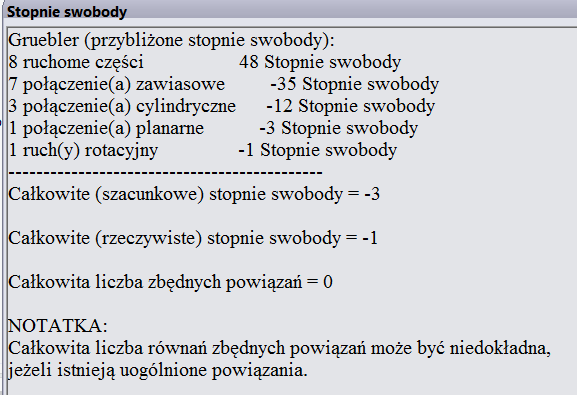
Podajnik podlega wiązaniom wprowadzonym na etapie tworzenia pliku złożeniowego. Składają się na nie relacje koncentryczne, połączenia zawiasowe oraz jedno wiązanie wspólne. Ważnym elementem każdej analizy ruchu jest analiza złożenia pod względem „Zbędnych wiązań” (and. Redundant Mates); ich wystąpienie byłoby równoznaczne z przedefiniowaniem modelu. Dobrym przykładem ilustrującym wspomniane przedefiniowanie mogłyby być drzwi na dwóch zawiasach. Tylko jedno wiązanie ogranicza pionową translację drzwi pozostawiając drugie zupełnie zbędnym. Gdyby jednak zamodelować oba połączenia otrzymalibyśmy w wynikach brak siły w kierunku pionowym w drugim zawiasie (byłoby to widoczne na wykresie). Metod redukcji zbędnych więzów jest kilka – nie są one jednak przedmiotem niniejszego artykułu (w podajniku ten fenomen nie występuje – można się o tym przekonać klikając „stopnie swobody” w zakładce dostępnej pod prawym przyciskiem myszy w wiązaniach.



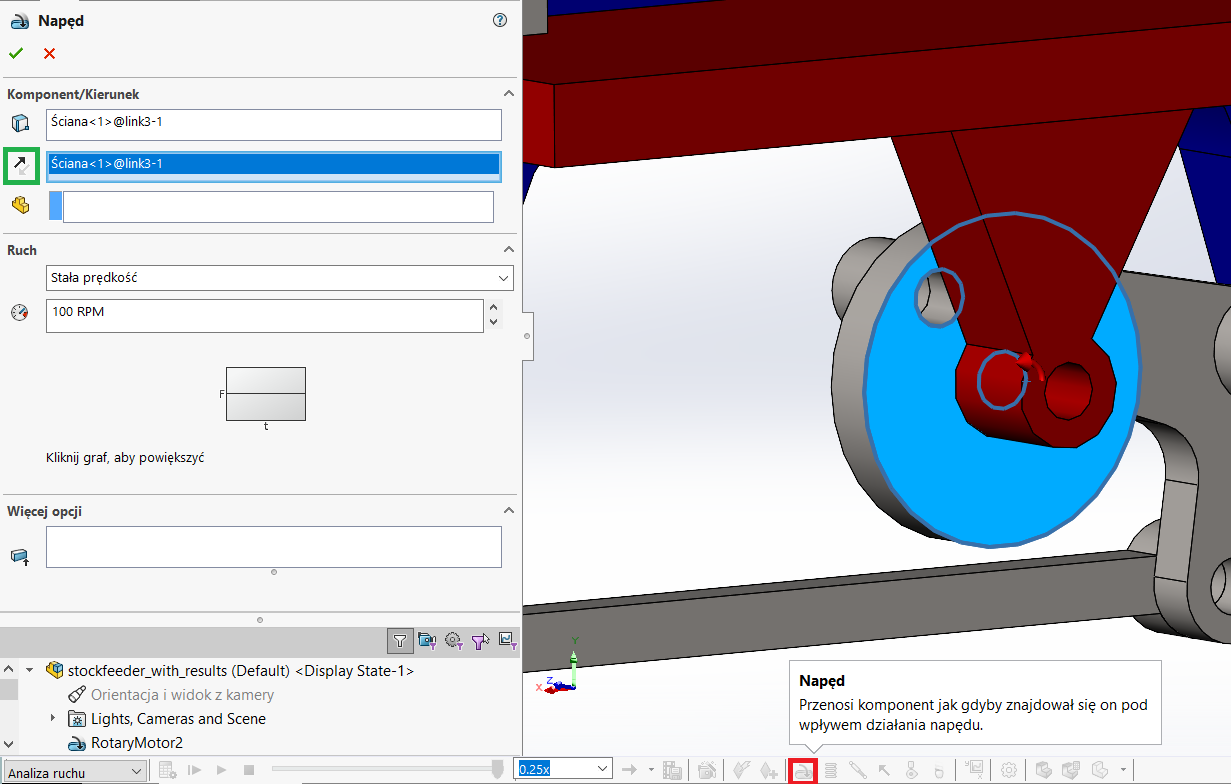
Definicja napędu odbywa się w trzech krokach. Po wybraniu odpowiedniej ikonki w pasku Motion (zaznaczona na ilustracji poniżej czerwonym kolorem) należy wybrać ściany, krawędzie lub punkty które mają podlegać ruchowi, kierunek ruchu oraz jego typ. W przypadku analizowanego podajnika chcielibyśmy, aby podświetlona ściana obracała się ze stałą prędkością 100 obrotów na minutę. Kierunek działania napędu został wybrany automatycznie. Gdyby jednak chcieć zmienić obrót z przeciwnego do ruchu wskazówek zegara na zgodny należy kliknąć ikonę zaznaczoną kolorem zielonym.
Aby w sposób wiarygodny odzwierciedlić na ekranie komputera ślizg profilu w ostatnim etapie przenoszenia należy zdefiniować odpowiednie kontakty. Kontakty są narzędziem umożliwiającym modelowanie kolizji, toczenia lub wzajemnego przesuwania komponentów. Można również użyć kontaktu tak, aby powiązać części w całym zakresie ruchu (ciągła styczność). Funkcjonalność jest dostępna po kliknięciu ikony zaznaczonej czerwonym prostokątem. W celu zdefiniowania relacji wybrano komponent przesuwany (profil) oraz blachę stanowiącą podłoże. Ponieważ profil wchodzi w interakcje w blachą zarówno w zakresie obowiązywania tarcia statycznego jak i dynamicznego wymagane jest uwzględnienie obu rodzajów poprzez zaznaczenie pól zielonych.

Podobnie należy uwzględnić kontakt pomiędzy profilem, a komponentem zapewniającym sekwencyjnie przesuwanie w pierwszej fazie ruchu. Komponenty wybrane do zdefiniowania relacji podświetlane są przez SOLIDWORKS domyślnie kolorem jasnoniebieskim.

Ostatnim etapem preprocessingu jest przypisanie grawitacji działającej w odpowiednim kierunku. Można to zrobić w pasku narzędzi Motion klikając na ikonę bezpośrednio sąsiadującą z funkcją „Kontakt” (po prawej stronie). Strzałka pojawiająca się w prawym dolnym rogu interfejsu pozwala na weryfikację zwrotu przyciągania grawitacyjnego. Po zatwierdzeniu operacji pozostaje jedynie zwiększyć w ustawieniach badania ilość klatek na sekundkę (wynikiem tej zmiany będzie upłynnienie animacji) oraz ustawić czas symulacji na arbitralne 10 sekund (jest to czas umożliwiający obliczenia do momentu wypadnięcia komponentu z podajnika).


Analiza wyników
Po uruchomieniu oraz przeprowadzeniu obliczeń użytkownik może naszkicować szerokie spektrum przebiegów licznych wielkości fizycznych (m.in. przemieszczeń, prędkości, przyspieszeń, wartości sił, momentów, energii, mocy i wielu innych) w funkcji nie tylko czasu, lecz innych wielkości. Czyni to omawiane oprogramowanie wyjątkowo atrakcyjnym dla braci konstruktorskiej poszukującej odpowiedzi na, bardzo często, skomplikowane zagadnienia.
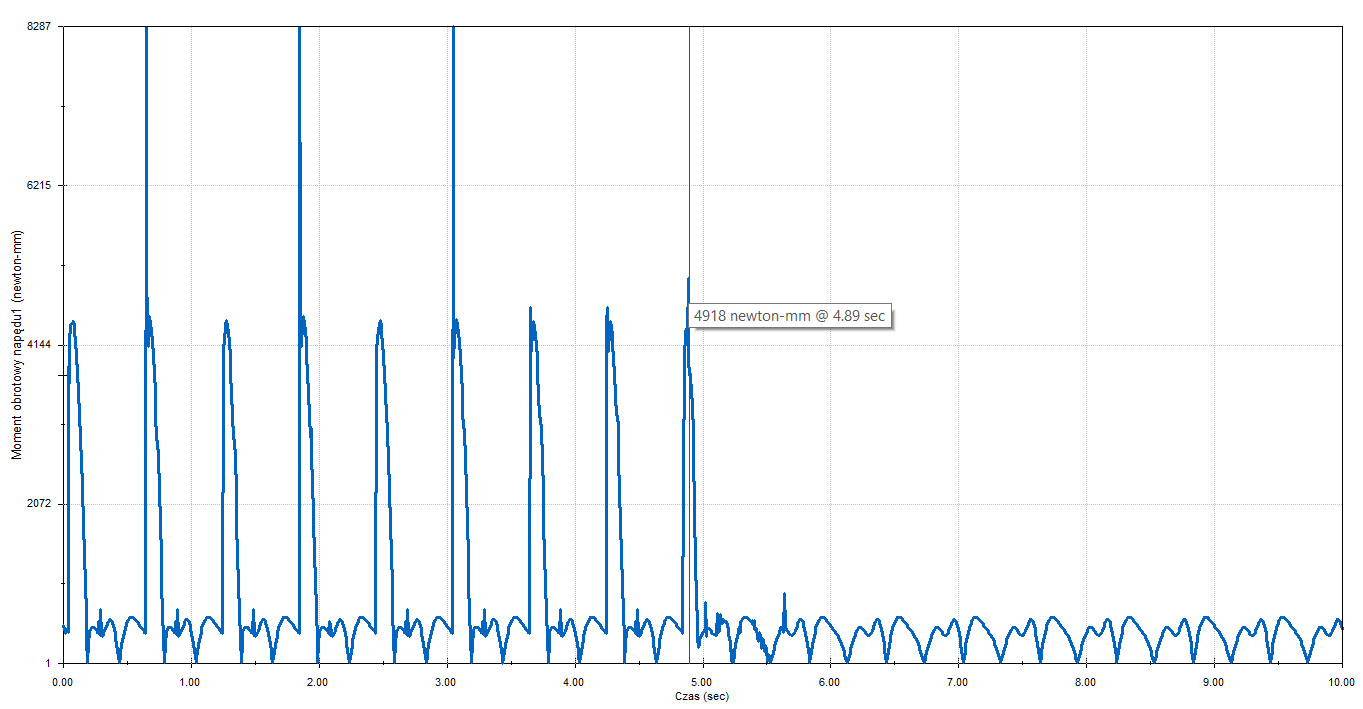
Jak wspomniano na początku jednym z celów przeprowadzanej symulacji jest odpowiedź na pytanie „Jaki moment obrotowy będzie potrzebny do napędu podajnika?”. Przechodząc w zakładkę wykresów, wybierając Siły -> Moment obrotowy napędu i zaznaczając wiersz powiązany z przypisaniem napędu w drzewku MotionManager, możemy wyświetlić żądany przebieg. Analizując wykres możemy dostrzec nagłe „peaki”. Każda z tych nagłych perturbacji odpowiada kolizji, która stowarzyszona jest z zetknięciem się profilu z komponentem zapewniającym sekwencyjne przesuwanie. Wartości wspomnianych peaków zależą w zasadzie wyłącznie od charakterystyk sztywności kontaktowych; ponieważ te są z kolei wartościami aproksymowanymi, nagłe wzrosty siły winny zostać przez użytkownika zignorowane. Zapoznając się dokładnie w wykresem dostrzeżemy, że napęd powinien umożliwiać wygenerowanie momentu obrotowego na poziomie bliskim 5 Nm.
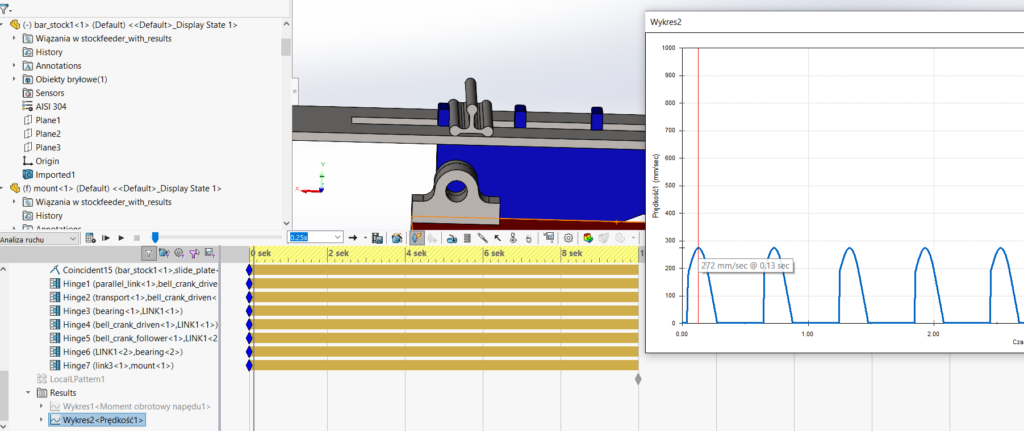
Podobnie utworzony został wykres prędkości w funkcji czasu. Klikając w odpowiednim miejscu na wykresie zauważyć można, iż program samodzielnie wyświetla klatkę animacji odpowiadającą wybranemu punktowi na wykresie. Czyni to etap postprocessingu znamienicie prostszym. W istocie zweryfikować możemy, że maksymalna prędkość występuje w oczekiwanym momencie pracy mechanizmu i wynosi w przybliżeniu 272 mm/sek.