

W dzisiejszych czasach roboty stają się coraz bardziej popularne i wykorzystywane są w wielu gałęziach przemysłu. Jednym z obszarów, w którym znajdują coraz większe zastosowanie jest obróbka skrawaniem i obrabiarki CNC. W dużych, zrobotyzowanych przedsiębiorstwach roboty często zastępują operatorów maszyn sterowanych numerycznie. Ale czy są w stanie zastąpić obrabiarkę CNC?
Robot, a maszyna CNC
Istotą pracy obrabiarki jest możliwość jej zaprogramowania, aby przenieść narzędzie w odpowiedni punkt z dużą dokładnością. W podobny sposób możemy zdefiniować robota: trzeba go zaprogramować, uzbroić w narzędzie wykonawcze oraz może on poruszać się precyzyjnie. W celu monitorowania i nadzorowania pracy, roboty wymagają zaawansowanego oprogramowania do programowania w trybie offline takiego jak RoboDK.
Roboty posiadają zbiór zalet, którymi nie mogą się chwalić obrabiarki CNC. Dzięki temu, że robot posiada większe możliwości wykonywania ruchów i większą liczbę stopni swobody niż obrabiarka jest wstanie osiągnąć każdy punkt programowalny do którego może dotrzeć na kilka sposobów. Środowisko RoboDK daje nam możliwość kontrolowania zakresu pracy robota.

Stanowisko
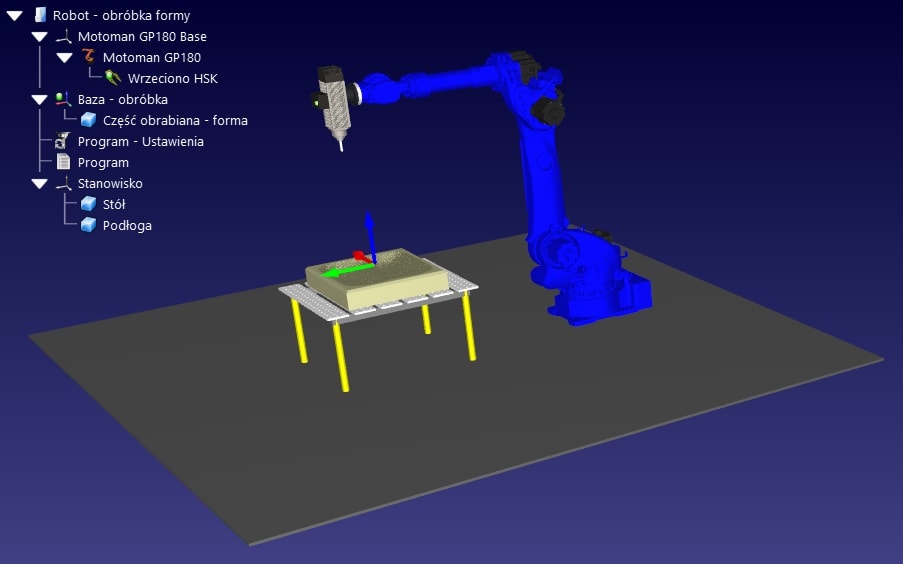
Aby robot mógł pełnić funkcję obrabiarki i pracować podobnie jak obrabiarka, niezbędne jest odpowiednie oprzyrządowanie. Pierwszoplanową rolę oczywiście stanowi robot, potrzebne będzie również wrzeciono, w które zostanie on uzbrojony. Niezbędny jest również detal obrabiany, elementy mocowania oraz program obróbczy definiujący ruch narzędzi i robota. Takie proste stanowisko jesteśmy w stanie w szybki sposób wykonać wirtualnie w programie RoboDK.
Chcąc zwiększyć efektywność i wydajność pracy należy umieścić robota na specjalnym torze jezdnym lub podwiesić go nad materiałem, spowoduje to rozszerzenie obszaru pracy, a w konsekwencji da możliwość do obróbki detali o większych gabarytach. Dodatkowo stół mocujący może być wyposażony w kilka osi obrotowych, co daje możliwość wykonywania detalu w jednym mocowaniu. Synchronizacja robota z zewnętrznymi osiami zostanie omówiona w kolejnych artykułach.

Programowanie
Do osiągnięcia takich samych wyników jak w przypadku maszyn CNC, roboty przemysłowe wymagają zaawansowanego oprogramowania do programowania w trybie offline, takiego jak RoboDK, które konwertuje programy maszynowe na programy robotów, a dodatkowo dzięki niemu programista łatwo dostrzega swoje błędy podczas pracy oraz zapewni bezkolizyjność, o którą trudno mając do zaprogramowania stanowisko wieloosiowe.
Obróbka z wykorzystaniem robota może obejmować różne procesy obróbki skrawaniem, takie jak np. frezowanie, toczenie, gratowanie, szlifowanie – zwykle wykonywane przez obrabiarki CNC.
Gabaryty części są definiowane przy pomocy oprogramowania typu CAD, a następnie przetwarzane na programy produkcyjne (takie jak G-kod), przy pomocy oprogramowania typu CAM. Programy produkcyjne mogą być konwertowane na język robota za pomocą odpowiedniego postprocesora znajdującego się w programie RoboDK. Narzędzia programu RoboDK są w stanie przekształcić 5 osiową obróbkę CAM, na obróbkę wykonywaną np. na 7-osiowym stanowisku zrobotyzowanym.

Program RoboDK bardzo dobrze współpracuje z oprogramowaniem klasy CAD/CAM, a w szczególności z programami Alphacam oraz SolidCAM. Za pomocą tych programów jesteśmy wstanie stworzyć skomplikowaną wieloosiową ścieżkę narzędzia i w prosty sposób zaimplementować ją do RoboDK. Programowanie wieloosiowej obróbki przy użyciu robota odbywa się za pośrednictwem pliku NC, który zawiera elementy składowe języka APT. Za pomocą post procesora plik NC przetwarzany jest na język robota np. KRC, RAPID.
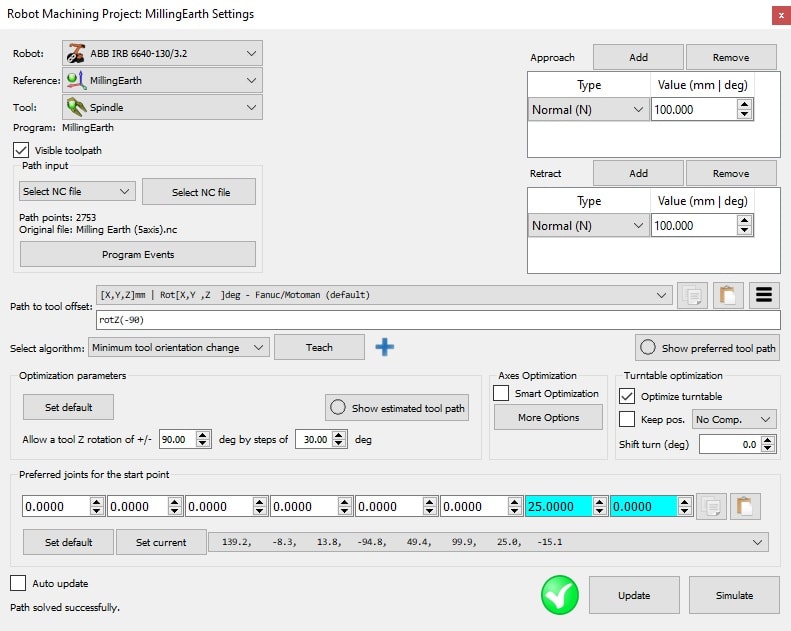
W RoboDK za pomocą narzędzia Robot Machining Project jesteśmy wstanie kontrolować pracę naszego stanowiska. Możemy modyfikować dojazdy i odjazdy względem materiału obrabianego. Narzędzie to daje nam możliwość zmiany orientacji robota względem ścieżki narzędzia. Możemy wybrać odpowiedni algorytm pracy robota oraz ograniczyć zakres jego ruchu. W przypadku synchronizacji stanowiska z dodatkowymi mechanizmami, przy użyciu tego narzędzia możemy kontrolować ich pracę.
Programowanie procesów obróbki skrawaniem z wykorzystaniem robota nie jest proste. Aby zwiększyć efektywność pracy w tym obszarze niezbędne jest wykorzystanie oprogramowanie do programowania robotów w trybie offline, takiego jak RoboDK.
Przetestuj RoboDK
Masz dodatkowe pytania dotyczące oprogramowania RoboDK? Chcesz otrzymać wersję Trial RoboDK? A może jesteś zainteresowany prezentacją rozwiązania? Skontaktuj się z nami korzystając z formularza kontaktowego.






